DR 120机器人本体技术参数
▶2.1 机器人本体构成图
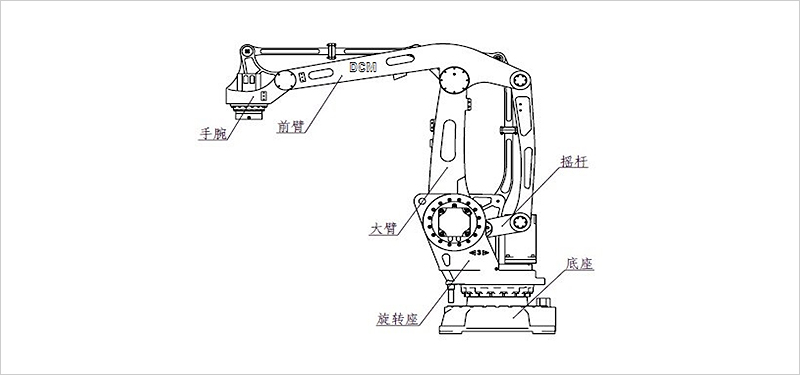
▶2.2 机器人机械参数
DR120机器人机械参数如表
|
机型 |
DR120 |
|
自由度 |
4 |
|
手腕负载 |
120 kg |
|
最大工作半径 |
2403 mm |
|
本体重量 |
1040 kg |
|
安装方式 |
水平 |
|
驱动方式 |
AC 伺服驱动 |
|
重复定位精度 |
±0.2mm |
|
噪声 |
<70dB(A) |
|
工作温度 |
0℃~+40℃ |
|
运输、储存温度 |
25℃~+55℃ |
|
湿度 |
75%AH 以下(短期 95%AH) |
|
振动 |
4.9m/s2 以下 |
|
机器人本体 IP 防护等级 |
IP40 |
|
控制柜 IP 防护等级 |
IP53 |
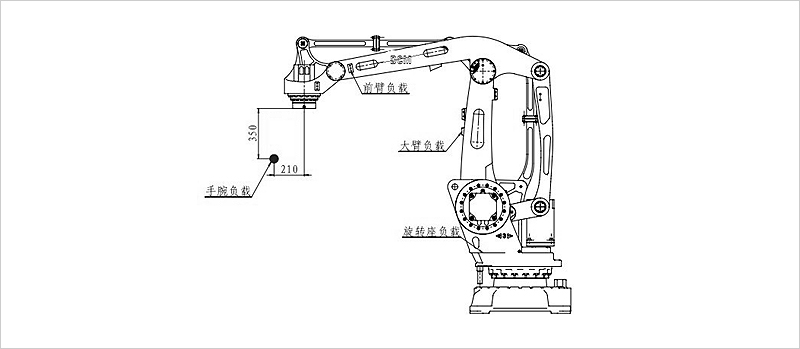
▶2.2 机器人负载参数
DR120型机器人负载参数如表
|
机器人型号 |
腕关节负载(kg) |
前臂负载(kg) |
|
DR120 |
120 |
24 |
DR120型机器人负载位置如图
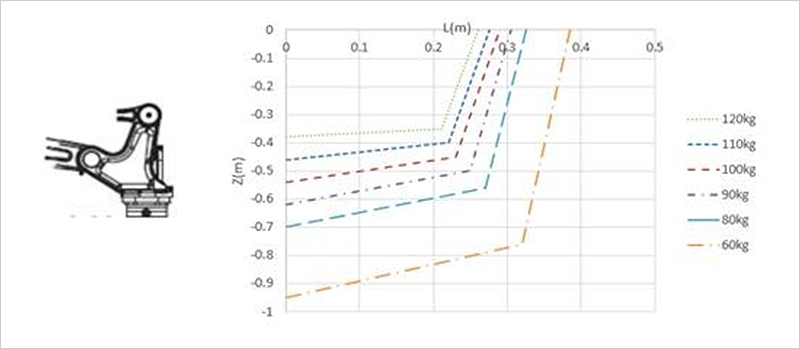
DR120手腕负载质量与重心的关系如图
▶2.4 机器人运动参数
DR120各关节运动参数如表
|
项目 |
规格 |
|
|
名称 |
DR120 |
|
|
关节速度 |
J1 |
145°/s |
|
J2 |
110°/s |
|
|
J3 |
120°/s |
|
|
J4 |
400°/s |
|
|
关节角度 |
J1 |
±165° |
|
J2 |
+85°~-40° |
|
|
J3 |
+120°~-20° |
|
|
J4 |
±300° |
|
|
手腕允许负载力矩 |
J4 |
250Nm |
|
手腕允许负载惯量 |
J4 |
70 kgm2 |
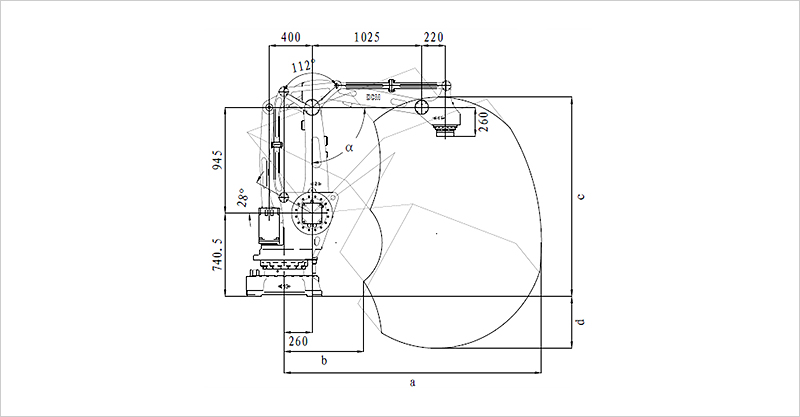
▶2.5 机器人工作空间
本工作空间反映的是机械系统零点及作业范围,与控制系统使用说明书中定义的稍有差异。
用户操纵机器人时须要以控制系统使用说明书中定义的为准,否则系统会报错。
DR120机器人工作空间如图,最初安装、固定机器人
|
a |
b |
c |
d |
25°≤α≤155° |
|
2403 |
742 |
1776 |
462 |